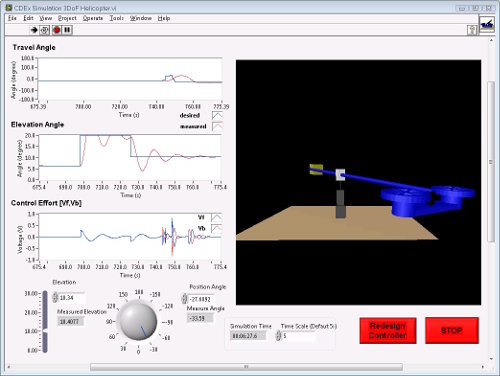
Ideal para introducir conceptos y teorías de control básicos en una plataforma intuitiva y fácil de usar
- Se puede usar sola o combinada con otros módulos
- Compatible con otros 7 módulos adicionales que permiten ampliar su uso
- Cables y conectores de acople rápido
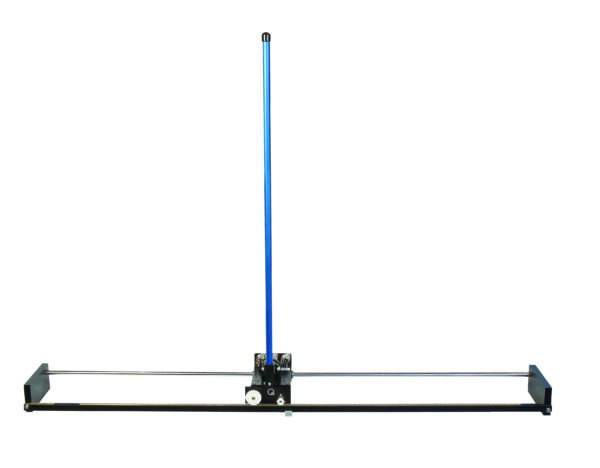
- Bastidor:
- 102 x 15 x 6,1 cm
- Aluminio de alta calidad
- Piezas de precisión terminadas a mano
- Servomotor:
- Carrito:
- 380 kg
- Desplazamiento posible: 81,4 cm
- Caja reductora:
- Encoders ópticos en cuadratura de 4096 cuentas/vuelta para detectar la posición del carro y ángulo del brazo del péndulo
- Pëndulos:
- Mediano: 33,65 cm
- Largo: 64,13 cm
- Envolvente: 219 x 30 x 127 (h) cm (con 56 cm debajo del punto de apoyo)
- Totalmente compatible con MATLAB® / Simulink® y LabVIEW
Estación de trabajo típica en la que participa este equipo
- Módulo de software Quanser Rapid Control Prototyping (Q-RCP) Toolkit® para LabVIEW 782688-01
- Amplificador lineal de voltaje Quanser VoltPAQ-X1 782505-01
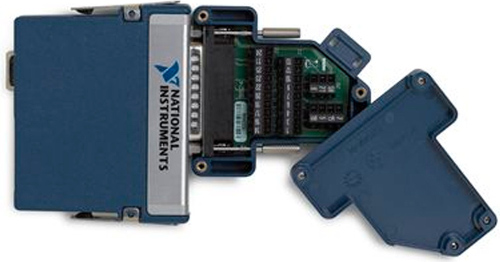
- Alguno de los módulos de adquisición de datos siguientes:
- Conjunto CompactRIO que incluya un módulo Quanser Q1-cRIO 782689-01
- NI myRIO 782692-01 con Quanser Terminal Board
- Quanser Q2-USB
- Quanser Q8-USB
- Quanser QPIDe
Temas en los que participa este equipo
- Modelización
- Derivación de los modelos dinámicos a partir de los primeros principios
- Representación de la función de transferencia
- Validación de modelos
- Derivación de un modelo dinámico usando Lagrange
- Diagrama de estados
- Linealización
- Control
- PID
- Adelanto de fase
- Control lineal cuadrático (LQR)
- Control híbrido
- Ubicación de polos
- Métods
- Basados en energía/control no lineal




 Video en YouTube
Video en YouTube



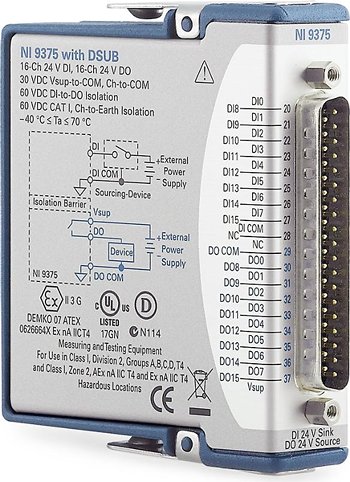
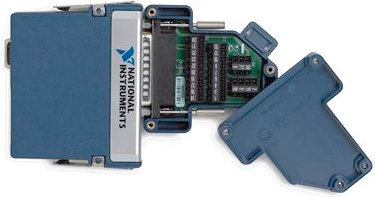
 El NI-9401 es una interfaz de E/S digitales . Por lo tanto, el NI-9401 Con la tecnología de E/S reconfigurables (RIO) (en CompactRIO únicamente), usted puede usar el Módulo LabVIEW FPGA para programar el NI-9401 para implementar contadores/temporizadores personalizados de alta velocidad; protocolos de comunicación digital; generación de pulso y más. Cada canal tiene aislamiento transitorio entre los canales de E/S y el plano trasero.
El NI-9401 es una interfaz de E/S digitales . Por lo tanto, el NI-9401 Con la tecnología de E/S reconfigurables (RIO) (en CompactRIO únicamente), usted puede usar el Módulo LabVIEW FPGA para programar el NI-9401 para implementar contadores/temporizadores personalizados de alta velocidad; protocolos de comunicación digital; generación de pulso y más. Cada canal tiene aislamiento transitorio entre los canales de E/S y el plano trasero.